
















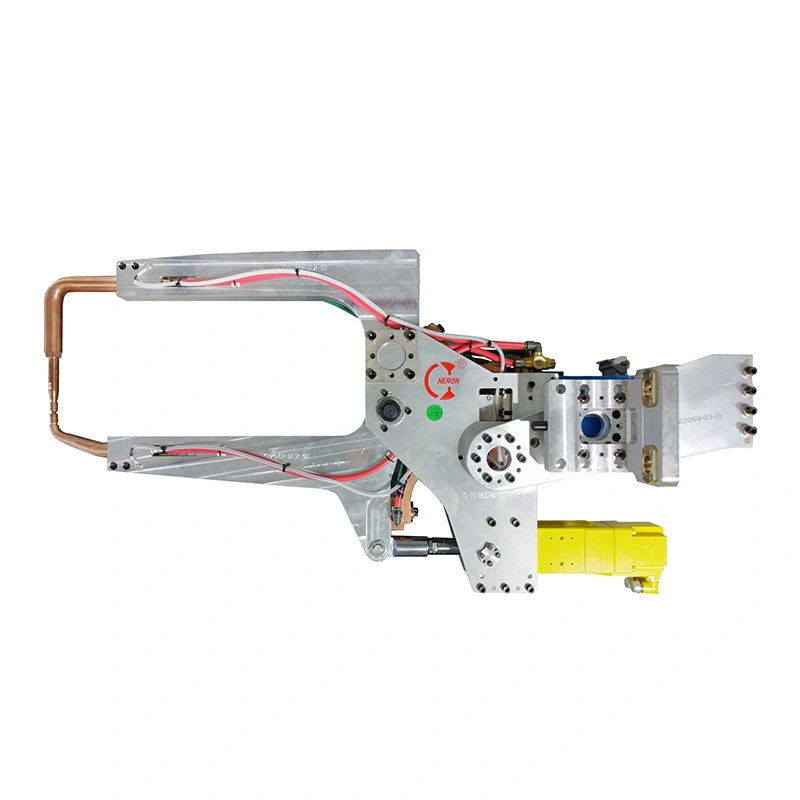
X Type Robotic Welding Gun with Servo Actuator
Descriptiona
1. Cum robot glutino, opus glutino sponte fieri potest sine glutino manuali post institutionem propriam.
2. Fibulae corpus leve aluminii structuram reducet in rate onus robot, quo celeritatem et efficaciam operandi auget.
3 Eximia rigiditas fibulae corporis permittit ut altas impressiones usque ad 600kg in electronicarum applicationum sustineat, quae bene instructam reddit ad exigentias glutino venae altae efficaciter occurrens.
4. Optime glutino qualitati adiuvat ad tollendam glutino falsitatem et necessitatem glutino manuali.
5 Producti iuncta confecti speciem nitidam et lappa-liberam exhibent, nullo opus manuum expolitione.
6. Transformator noster propriae notae compages compactae, promptus est in duabus seriebus 1000Hz/2000Hz ad electionem.
7. Praevidemus perspicuas tractus et qualitatem technicam servitutis, et productum facile ad disassemble et conservare ad experientiam operationis lenis et efficax praebere.
8. Ambae cylindrici electrici integrati et coniuncti servo cylindrici electrici applicabiles sunt, et C-typus et X-type fibulae robot glutino valde normatae et convertuntur usque ad 80%.
9. Praeclara observantia instrumenti praefecti et parametri erectionis schema efficaciter spargens reducere, altiore ambitu officinam augendo.
Opportuna
Maxime adhibita industria in autocinetis fabricandis ad locum glutino nexum partium structurarum automotivarum consequendum, corpus automotivum in albo, inter tabulas alae anteriores, portas, cucullas, sarcinas cellularum aliarumque partium.
Exemplaria welding
Specification
| Exemplar No | DB6-075-X16005-00 | DB6-110-X15013-00 | DB6-110-X16048-00 | DB6-110-X15007-00 |
| Crassa Pondus-Kg) | 95.5 | 119 | 113.2 | 140 |
| Rated De capacitate Transformer(KVA) | 75 | 110 | 110 | 110 |
| Brachium Size(mm) | 384*160 | 284*125 | 242*300 | 815*250 |
| L*H*W mm) | 1161*532*302 | 1050*531*190 | 1121*537*302 | 1400*825*190 |
| Maximilianus. Brevis Circuitu Current(KA) | 20 | 24 | 24 | 24 |
| Max Stroke(mm) | 179 | 139 | 120 | 300 |
| Max Electrode Force(N) | 3900 | 4400 | 5000 | 4000 |
| Brachium Deflection(mm) | ≤1.5 | ≤1.5 | ≤1.5 | ≤1.5 |
| Electrode Off Centre(mm) | ≤0.5 | ≤0.5 | ≤0.5 | ≤0.5 |
| CENTRUM GravityX/Y/Z,cm) | 0.3/0.1/52.7 | 2.3/0.1/47.6 | 5.6/0.1/48.4 | 3/1.1/56.7 |
| Brachium Materiale | Aluminium Aviation | Aluminium Aviation | Aluminium Aviation | Aluminium Aviation |
| Cum robot via connectens | Top, Bottom, Left, Right, Tergo | |||
| Servo Motor | Applicare ad omnes faces robotae et cum EXLAR integrari possunt | |||